0. What is image segmentation?¶
Segmentation means labeling each pixel so that we can tell which pile of pixels belongs to which real‑world object.
There are two main types of segmentation:
- Semantic segmentation: Label each pixel with its class (e.g. "stroma", "cytoplasm", "background"). Good for tissues.
- Instance segmentation: Label each pixel with a unique ID for each object (e.g. "cell 1", "cell 2" or "nucleus 1", "nucleus 2"). Good for cell-based analysis.
In bioimage analysis that usually means turning a fluorescence snapshot into a binary mask of some cellular, subcellular, or tissue structure. Once you have a mask you can measure size, shape, intensity, count cells, follow them over time – all the good stuff.
There are many ways to segment.
Today we will cover two classical yet powerful techniques that get you surprisingly far:
| Chapter |
Technique |
Typical use‑case |
| 1 |
Gaussian + Otsu threshold |
Simple foreground / background separation |
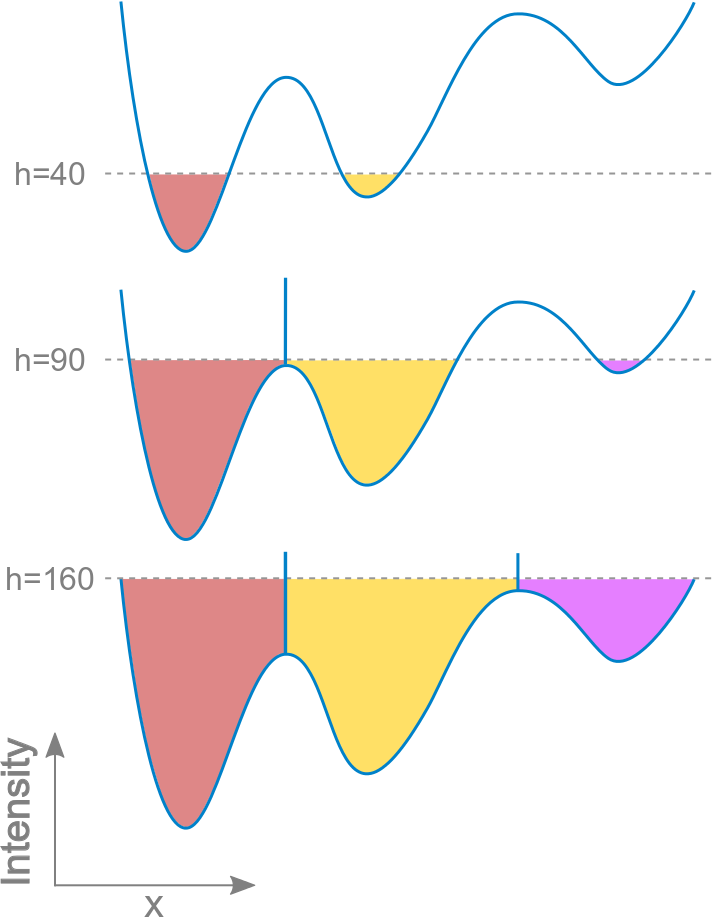
| 2 |
Watershed |
Split touching objects into individual pieces |
Each chapter follows the same pattern:
- Theory – short, intuitive overview (no equations needed).
- Live demo – run the code and poke at the parameters.
- Your turn – exercises marked with ✍️ to make you write code.
Ready? Scroll on!